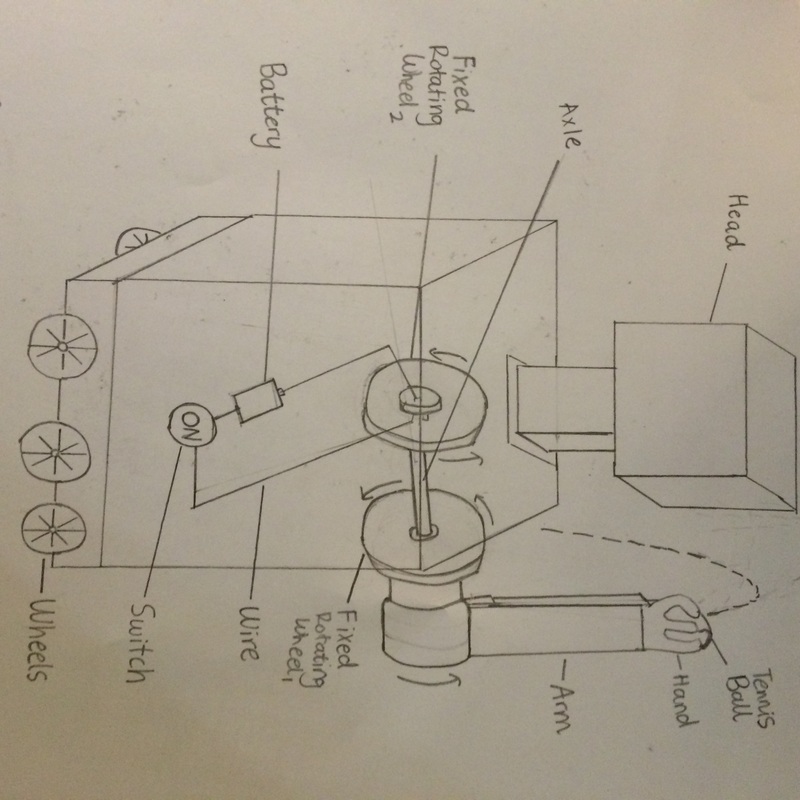
After researching simple machines and their properties, I have designed my own robot that makes use of a variety of these devices. It is intended to perform one simple function: throw a tennis ball. In order for it to fulfill its job, a process involving a wheel and axle system, electrical circuit and some screws has been implemented. The ball-throwing arm is attached to its shoulder using a wheel, which is connected to a second wheel by an axle. This second wheel is located in the interior of the robot and is linked to an electrical circuit. When the switch is turned on by pressing a button in the back of the robot, the hidden wheel will start rotating. Since it is connected to the shoulder wheel, the shoulder wheel will also start spinning. Thus, when the shoulder wheel causes the arm attached to it to rotate, the final step has been completed. At a certain point in its pathway, the arm will release the ball due to gravity. If the user wants to stop the robot, then they should press the switch button again to break the flow of the electrical circuit.
Overall, in order for my robot to function, it requires the following simple machines and additional parts:
- Wheel And Axle: Used to convert the power from electrical circuit to the rotating arm
- Screws: Used to keep the exterior plates in place and stabilise the robot.
- Electrical Circuit (Battery, Switch and Wires): Used to power wheels which cause the robot's arm to turn
- Aluminium Plates: Used to protect vital parts of robot; used to keep wires and simple machines inside robot